Roboter Inhaltsverzeichnis Bezeichnung | Definitionen | Geschichte der Robotik | Kulturgeschichte |...
RoboterHandhabungstechnik
mechanischeArbeitMaschinenComputerprogrammentschechischenRobotFrondienstZwangsarbeitAltkirchenslawischProtoindoeuropäischSpätmittelhochdeutschenJosef ČapekKarel ČapekR.U.R.Golemshumanoide RoboterVDI-RichtlinieJapan Robot AssociationInternational Federation of RoboticsGeneral MotorsR.U.R.Karel ČapekScience-FictionRobotikIsaac AsimovMechanikElektrotechnikInformatikMechatronikPathfindingKünstlichen IntelligenzNeuroinformatikBiologische KybernetikBionikautonometranslatorischenrotatorischenAchsenDenavit-Hartenberg-TransformationKoordinatensystemeVektorhomogenenMatrixDenavit-Hartenberg-TransformationPoseTabellenkalkulationMatlabFreeMatdirekte KinematikInverse KinematikRoboterkalibrierungGetriebespielHobbyelektronikRobotersumoLego MindstormsCompressorheadASIMOHondaAtlasLaufroboterGeneral MotorsProduktionslinienSchweißarbeitenAutomobilindustrieKlebenPortalroboterWafernVergussanlagenMesstechnikHandlingaufgabenMedizinroboterDa-Vinci-OperationssystemCare-O-botAiboSonyRobosapienWowWeeRoboterfußballLego-Mindstorms-SerieServiceroboterPyramidenschächteSensorenWostokseeGlobal HawkSWORDSSpiritOpportunityMondroverTALONKampfroboterAutonomous Underwater VehiclesAutismustherapiePflege älterer MenschenCynthia BreazealFrauke Zellersozialen GefällesWilliam Grey WalterBEAM RoboterTeddybärAktorenKünstliche IntelligenzBDI ArchitekturRobotinoLego MindstormsInformatikBot
Ein Roboter ist eine technische Apparatur, die üblicherweise dazu dient, dem Menschen häufig wiederkehrende mechanische Arbeit abzunehmen. Roboter können sowohl ortsfeste als auch mobile Maschinen sein und werden von Computerprogrammen gesteuert. Die Wortbedeutung hat sich im Laufe der Zeit gewandelt.
Inhaltsverzeichnis
1 Bezeichnung
2 Definitionen
2.1 Definition nach VDI-Richtlinie 2860
2.2 Definition nach Robotic Industries Association
2.3 Definition nach JARA
3 Geschichte der Robotik
4 Kulturgeschichte
5 Robotik
5.1 Technische Grundlagen
5.1.1 Roboterkinematiken
5.1.1.1 Bewegungsform der Achsen
5.1.1.2 Anzahl und Anordnung der Achsen
5.1.1.3 Formen des Arbeitsraumes
5.1.2 Mathematik und Roboter
5.1.2.1 Häufig verwendete Koordinatensysteme bei Industrierobotern
5.1.2.2 Mathematische Beschreibung von Robotern
5.1.2.3 Direkte Kinematik
5.1.2.4 Inverse Kinematik
5.1.3 Roboterauswahl
6 Roboterarten
6.1 Autonome mobile Roboter
6.2 Humanoide Roboter
6.3 Industrieroboter
6.4 Medizinroboter
6.5 Serviceroboter
6.5.1 Serviceroboter für Privatpersonen
6.5.2 Professionelle Serviceroboter
6.6 Spielzeugroboter
6.7 Erkundungsroboter
6.7.1 Militärroboter
6.7.2 Rover und Lander
6.7.3 Personal Robots
6.7.4 Sonstige Erkundungsroboter
6.8 Soziale Robotik
6.8.1 Geschichte
6.8.2 Technische Realisierung
6.9 Sonstige Roboterarten
7 Übernahme des Begriffs in der Informatik
8 Rezeption
8.1 Ausstellungen
8.2 Filmische Dokumentationen
9 Siehe auch
10 Literatur
11 Ausstellung
12 Weblinks
13 Einzelnachweise
Bezeichnung |
Der Ursprung des Wortes Roboter liegt im tschechischen Wort robota, Robot, das mit ‚Frondienst‘ oder ‚Zwangsarbeit‘ übersetzt werden kann. Es geht wiederum über Altkirchenslawisch rabota ‚Knechtschaft‘ auf Protoindoeuropäisch *orbh- zurück und ist damit mit dem deutschen ‚Arbeit‘ verwandt.[1] Ähnlich gab es im Spätmittelhochdeutschen für einen ‚Arbeiter im Frondienst‘ den Begriff robāter, robatter.[2]
Die Bezeichnung robot wurde 1920 von Josef Čapek, einem bedeutenden Literaten geprägt, dessen Bruder Karel Čapek ursprünglich den Namen labori verwendet hatte, als er in seinem Theaterstück R.U.R. in Tanks gezüchtete menschenähnliche künstliche Arbeiter auftreten ließ, die dafür geschaffen worden sind, menschliche Arbeit zu übernehmen, und die dagegen revoltieren.[3] Mit seinem Werk griff Čapek das klassische, ebenfalls in der Prager Literatur der jüdischen Mystik verbreitete Motiv des Golems auf. Heute würde man Čapeks Kunstgeschöpfe als Androiden bezeichnen. Vor der Prägung des Wortes Roboter wurden solche Maschinen Automaten oder Halbautomaten genannt.
Definitionen |
Während der Entwicklung von Handhabungsgeräten, die immer komplizierter wurden, kamen Entwickler auf die Idee, sie „Roboter“ zu nennen. Spätestens ab diesem Zeitpunkt wurde das Wort „Roboter“, welches ursprünglich nur für humanoide Roboter verwendet wurde, fast beliebig für verschiedene Geräte benutzt. Entsprechend unterschiedlich ist die Definition eines Roboters von Land zu Land. So kommt es, dass 1983 von Japan 47.000 dort installierte Roboter gemeldet wurden, von denen nach VDI-Richtlinie 2860 nicht einmal 3.000 als Roboter gegolten hätten.[4]
Definition nach VDI-Richtlinie 2860 |
„Industrieroboter sind universell einsetzbare Bewegungsautomaten mit mehreren Achsen, deren Bewegungen hinsichtlich Bewegungsfolge und Wegen bzw. Winkeln frei (d. h. ohne mechanischen bzw. menschlichen Eingriff) programmierbar und gegebenenfalls sensorgeführt sind. Sie sind mit Greifern, Werkzeugen oder anderen Fertigungsmitteln ausrüstbar und können Handhabungs- und/oder Fertigungsaufgaben ausführen.“
Definition nach Robotic Industries Association |
„A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools or specialized devices through variable programmed motions for the performance of a variety of tasks“
„Ein Roboter ist ein programmierbares Mehrzweck-Handhabungsgerät für das Bewegen von Material, Werkstücken, Werkzeugen oder Spezialgeräten. Der frei programmierbare Bewegungsablauf macht ihn für verschiedenste Aufgaben einsetzbar.“
Aktueller ist die Auffassung, dass man unter einem Roboter ein Gerät versteht, das mindestens über drei frei bewegliche Achsen verfügt.[5]
Definition nach JARA |
Die Japan Robot Association gibt die folgenden Merkmale vor:
Manual Manipulator: Handhabungsgerät, das kein Programm hat, sondern direkt vom Bediener geführt wird,
Fixed Sequence Robot: Handhabungsgerät, das wiederholt nach einem konstanten Bewegungsmuster arbeitet. Das Ändern des Bewegungsmusters ist relativ aufwendig,
Variable Sequence Robot: Handhabungsgerät, wie vorher beschrieben, jedoch mit der Möglichkeit, den Bewegungsablauf schnell und problemlos zu ändern,
Playback Robot: Der Bewegungsablauf wird diesem Gerät einmal durch den Bediener vorgeführt und dabei im Programmspeicher gespeichert. Mit der im Speicher enthaltenen Information kann der Bewegungsablauf beliebig wiederholt werden,
Numerical Control Robot: Dieses Handhabungsgerät arbeitet ähnlich wie eine NC-gesteuerte Maschine. Die Information über den Bewegungsablauf wird dem Gerät über Taster, Schalter oder Datenträger zahlenmäßig eingegeben,
Intelligent Robot: Diese höchste Roboterklasse ist für Geräte gedacht, die über verschiedene Sensoren verfügen und damit in der Lage sind, den Programmablauf selbsttätig den Veränderungen des Werkstücks und der Umwelt anzupassen.
Geschichte der Robotik |
2004 waren zwei Millionen Roboter im Einsatz.[6] Die deutsche Roboterbranche steigerte 2007 den Umsatz um 13 Prozent.[7] Nach Erhebungen des Robotikverbandes International Federation of Robotics haben sich im Jahr 2014 die Verkäufe von Industrierobotern im Vergleich zum Vorjahr um 29 % auf 229.261 Stück erhöht.[8]General Motors plant erste unbemannte Pkw im Test ab 2015[veraltet] und in der Serienproduktion ab 2018[veraltet].[9][10]
Kulturgeschichte |
In der Literatur und anderen Medien wird der Roboter vor allem als „Maschinenmensch“ thematisiert beziehungsweise als autonomes Maschinenwesen, das dem Menschen als Helfer oder aber als Bedrohung gegenübersteht. Der heute im allgemeinen Sprachgebrauch verwurzelte Begriff Roboter entstammt ursprünglich dem 1920 veröffentlichtem Theaterstück R.U.R. von Karel Čapek und ist ein Beispiel für die Wechselwirkung zwischen der Fiktion und dem realen Fortschritt der Technik. Roboter treten bereits in der Frühzeit des Films auf und sind, in unterschiedlichster Gestalt, ein wiederkehrendes Thema der Science-Fiction.
Robotik |
Durch die häufige Thematisierung von Robotern in Film und Literatur wurde auch die Wissenschaft aufmerksam auf diese Art der Maschinen. Das wissenschaftliche Gebiet, das sich mit der Konstruktion von Robotern beschäftigt, heißt Robotik. Der Begriff wurde 1942 von Isaac Asimov in seiner Kurzgeschichte Runaround erstmals erwähnt. Ein allgemeines theoretisches wissenschaftliches Gebiet, welches sich mit Robotern beschäftigt, gibt es nicht. Sie sind meist Teilgebiete der Elektrotechnik, Informatik, Mechatronik oder des Maschinenbaus.
Technische Grundlagen |
Technisch realisiert werden Roboter hauptsächlich im Zusammenspiel der Disziplinen Mechanik, Elektrotechnik und Informatik. Inzwischen hat sich aus der Verbindung dieser drei Disziplinen die Mechatronik entwickelt. Um autonome Systeme zu entwickeln, die eine gewisse Eigenständigkeit (beispielsweise beim Pathfinding) aufweisen, werden immer mehr wissenschaftliche Disziplinen in die Robotik eingebunden. Hier liegt ein Schwerpunkt der Verbindung von Konzepten der Künstlichen Intelligenz oder der Neuroinformatik und ihrer biologischen Vorbilder (Biologische Kybernetik). Aus der Verbindung von Biologie und Technik entstand wiederum die Bionik.
Wichtigste Bestandteile eines Roboters sind die Sensoren zur Erfassung der Umwelt und der Achspositionen, die Aktoren zum Agieren innerhalb der erfassten Umgebung, die Robotersteuerung und das mechanische Gestell inklusive der Getriebe. Ein Roboter muss nicht unbedingt vollständig autonom handeln können. Darum unterscheidet man autonome und ferngesteuerte Roboter.
Roboterkinematiken |
Der mechanische Aufbau eines Roboters wird mit Hilfe der Kinematik beschrieben. Dabei sind folgende Kriterien von Bedeutung:
- Bewegungsform der Achsen
- Anzahl und Anordnung der Achsen
- Formen des Arbeitsraumes (kartesisch, zylindrisch, kugelig)
Außerdem wird unterschieden in offene Kinematiken und geschlossene Kinematiken. Eine offene Kinematik ist dadurch gekennzeichnet, dass alle Achsen der kinematischen Kette hintereinander liegen, so wie an einem menschlichen Arm. Es ist also nicht jedes Glied der Kette mit zwei anderen Gliedern verbunden. In einer geschlossenen Kinematik hingegen ist jedes Glied mit mindestens zwei anderen Gliedern verbunden (Beispiel: Hexapodroboter).
Die Begriffe Vorwärtskinematik und Inverse Kinematik (auch Rückwärtskinematik) bezeichnen die mathematische Modellierung der Bewegung von Robotersystemen. In der Vorwärtskinematik werden für jedes Gelenk der kinematischen Kette Einstellparameter vorgegeben (je nach Gelenktyp Winkel oder Strecken) und die daraus resultierende Position und Orientierung des Endeffektors im Raum wird berechnet. Bei der Rückwärtskinematik werden dagegen Position und Orientierung des Endeffektors vorgegeben und die erforderlichen Einstellparameter der Gelenke werden berechnet (Vorwärts- und Rückwärtstransformation).
Bewegungsform der Achsen |
Hier wird zwischen translatorischen und rotatorischen Achsen unterschieden.
Anzahl und Anordnung der Achsen |
Zur Beschreibung von Robotern wird sowohl die Anzahl als auch Anordnung der Achsen herangezogen. Hierbei sind die Reihenfolge und die Lage der Achsen zu berücksichtigen. Diese können im Falle einer seriellen (offenen) Kinematik wie mit der so genannten Denavit-Hartenberg-Transformation beschrieben werden.
Formen des Arbeitsraumes |
Obige Kriterien in Verbindung mit den Abständen der Achsen zueinander oder deren „Verfahrwege“ ergeben die Form und Größe des Arbeitsraumes eines Roboters. Gebräuchliche Arbeitsräume sind: Kubus, Zylinder, Kugel oder Quader.
Mathematik und Roboter |
Häufig verwendete Koordinatensysteme bei Industrierobotern |
Die wichtigsten Koordinatensysteme (Abk. KOS) bei Robotern sind
- das Basis- oder Welt-KOS, das sich in der Regel im Roboterfuß befindet,
- das Tool-KOS, das sich im Roboterflansch befindet. Bezüglich dieses KOS ist der Tool Center Point (Abk. TCP) einzumessen, der den Arbeitspunkt des montierten Tools beschreibt. Der TCP kann in der Regel aus den CAD-Daten übernommen werden oder wird mit Hilfe des Roboters durch Messfahrten ermittelt,
- das Werkstück-KOS, das die Lage des Prozesses oder Werkstückes beschreibt und es festlegt oder einmisst. Die Positionen, die der Roboter anfährt, werden in der Regel in diesem KOS beschrieben. Der Vorteil eines Werkstückkoordinatensystems zeigt sich bei Änderungen der Anlage, da damit eine Wiederinbetriebnahme einfach durch Einmessung des Werkstück-KOS deutlich erleichtert wird. Zur Vermessung des Werkstück-KOS stehen meistens Routinen von den Roboterherstellern zur Verfügung. Grundsätzlich wird dabei in der Regel durch drei Punkte eine Ebene beschrieben.
Mathematische Beschreibung von Robotern |
Um Roboter in Bewegung setzen zu können, müssen sie mathematisch beschrieben werden. Dies geschieht durch Transformationen (siehe auch Koordinatentransformation). Dabei beschreibt die Transformation T die Lage eines Koordinatensystems in Relation zu einem Bezugskoordinatensystem. Da sich die Lage des KOS im allgemeinen Fall sowohl durch Verdrehungen als auch durch Translation ergeben kann, sind zur Berechnung ein rotatorischer – die Vektoren A, B und C als Einheitsvektoren – und auch ein translatorischer Anteil P, eine Verschiebung, notwendig.
Mathematisch wird somit der dreidimensionale, rotatorische Anteil ergänzt um eine weitere Dimension, einen Vektor, die kombiniert zu folgender homogenen 4 × 4 – Matrix führen:
- T=(AxBxCxPxAyByCyPyAzBzCzPz0001){displaystyle T={begin{pmatrix}Ax&Bx&Cx&Px\Ay&By&Cy&Py\Az&Bz&Cz&Pz\0&0&0&1end{pmatrix}}}

Wird nun jeder Achse ein Koordinatensystem beispielsweise entsprechend der Denavit-Hartenberg-Transformation zugeordnet, ist man in der Lage, die Position beliebig vieler, aufeinander folgender Achsen zu berechnen. Praktisch lässt sich bereits die Berechnung von sechs Achsen nur mit einem erheblichen Schreibaufwand realisieren. Um nur eine Pose (Position und Orientierung) zu berechnen, kann daher ein Hilfsmittel wie eine Tabellenkalkulation hilfreich sein. Ist die Berechnung mehrerer Posen notwendig, empfiehlt es sich, auf entsprechende mathematisch orientierte Softwareprodukte wie Matlab oder auf FreeMat zurückzugreifen.
Direkte Kinematik |
Die direkte Kinematik wird verwendet, um aus den gegebenen Achswinkeln, also den Verschiebungen der Gelenke eines Roboters, die kartesischen Koordinaten und die Orientierung des TCPs zu ermitteln. Sind die Denavit-Hartenberg-Parameter (θ,d,a,α{displaystyle theta ,d,a,alpha }) bekannt, so kann mit

- T=(cosθ−sinθcosαsinθsinαacosθsinθcosθcosα−cosθsinαasinθ0sinαcosαd0001){displaystyle T={begin{pmatrix}cos theta &-sin theta cos alpha &sin theta sin alpha &acos theta \sin theta &cos theta cos alpha &-cos theta sin alpha &asin theta \0&sin alpha &cos alpha &d\0&0&0&1end{pmatrix}}}

die Transformation zwischen zwei Achsen bestimmt werden. Verallgemeinert ergibt sich:
- n−1Tn=(cosθn−sinθncosαnsinθnsinαnancosθnsinθncosθncosαn−cosθnsinαnansinθn0sinαncosαndn0001).{displaystyle {}^{n-1}T_{n}={begin{pmatrix}cos theta _{n}&-sin theta _{n}cos alpha _{n}&sin theta _{n}sin alpha _{n}&a_{n}cos theta _{n}\sin theta _{n}&cos theta _{n}cos alpha _{n}&-cos theta _{n}sin alpha _{n}&a_{n}sin theta _{n}\0&sin alpha _{n}&cos alpha _{n}&d_{n}\0&0&0&1end{pmatrix}}.}

Für Industrieroboter mit den üblichen sechs Achsen ist diese Transformation somit fünfmal durchzuführen. Um einen TCP zu berücksichtigen, wird eine weitere Transformation angefügt. Bei der Vorwärtstransformation ergibt sich somit für einen sechsachsigen Roboter mit Tool
- T=T1T2T3T4T5Ttcp.{displaystyle T=T_{1}T_{2}T_{3}T_{4}T_{5}T_{tcp}.}

Damit kann nun die Position und Orientierung des TCPs bezogen auf den Roboterfuss berechnet werden. Darüber hinaus ist diese Berechnung auch für Roboter mit mehr als sechs Achsen eindeutig.
Inverse Kinematik |
Die so genannte Inverse Kinematik wird eingesetzt, um bei vorgegebener Position und Orientierung des TCP zu berechnen, welche Gelenkparameter (Winkel oder Verschiebung) in den einzelnen Gliedern eingestellt werden müssen, um dieses Ziel zu erreichen. Sie ist somit die Umkehrung der Vorwärtstransformation. Grundsätzlich gibt es zwei Lösungsansätze, einen geometrischen und einen analytischen.
Roboterauswahl |
Bei der Wahl eines Roboters sind verschiedene Kriterien von Bedeutung: Traglast, deren Schwerpunkt und Eigenträgheit, der Arbeitsbereich in dem der Prozess stattfinden soll, die Prozessgeschwindigkeit oder die Zykluszeit und die Genauigkeit des Roboters. Letztere wird auf der Basis der ISO 9283 ermittelt. Dabei wird im Wesentlichen zwischen der Genauigkeit der Position (hier wird auch von Pose gesprochen) und der Bahngenauigkeit unterschieden. Für die Pose als auch für die Bahn wird in der Regel sowohl die so genannte Absolut- als auch die Wiederholgenauigkeit ermittelt. Dabei spiegelt die Absolutgenauigkeit den Unterschied zwischen der tatsächlichen und der theoretischen, der programmierten, Pose oder Bahn wider. Hingegen ergibt sich die Wiederholgenauigkeit aus mehreren Fahrten oder Messungen des Roboters auf theoretisch die gleiche Position oder Bahn. Sie ist somit ein Maß für die Streuung, die bei den meisten praktischen Anwendungen von größerer Bedeutung ist als die Absolutgenauigkeit. Im Übrigen kann die Absolutgenauigkeit eines Roboters durch eine Roboterkalibrierung verbessert werden, hingegen ergibt sich die Wiederholgenauigkeit im Wesentlichen aus dem Getriebespiel und kann somit softwaretechnisch praktisch nicht kompensiert werden.
Roboterarten |

Portalroboter mit Linearführungen
Der Begriff „Roboter“ beschreibt ein weitgefächertes Gebiet, weshalb man Roboter in viele Kategorien einordnet. Einige davon sind:
- nach Konstruktionsweise
- autonome mobile Roboter
- Beam
- humanoide Roboter
- kognitive Roboter
- Laufroboter
- Portalroboter
- nach Verwendungszweck
- Erkundungsroboter
- Industrieroboter
- Medizinroboter
- Personal Robot
- Serviceroboter
- Spielzeugroboter
- Transportroboter[11]
Autonome mobile Roboter |

Robotersumo
Autonome, mobile Roboter bewegen sich selbstständig und erledigen ohne menschliche Hilfe eine Aufgabe. Der Bau von autonomen, mobilen Robotern ist ein beliebtes Teilgebiet der Hobbyelektronik. Typische Funktionen von solchen Robotern sind z. B.: einer Linie auf dem Boden folgen, Hindernissen ausweichen, Robotersumo oder einer Lichtquelle folgen. Für einige dieser Roboterarten gibt es Wettkämpfe. Der Bau von autonomen, mobilen Robotern wird auch von Schülern als Abschlussarbeit gewählt. Bereits im Kindesalter lassen sich solche Roboter mit Bausätzen wie z. B. mit Lego Mindstorms bauen.
Mit Compressorhead existiert eine komplett aus Robotern bestehende Rockband, die verschiedene bekannte Metal- und Punksongs covert.
Humanoide Roboter |

Humanoider Roboter ASIMO

Humanoider Roboter Kotarō
Das Bild des humanoiden Roboters in der Literatur wurde, wie bereits erwähnt, maßgeblich durch die Erzählungen Isaac Asimovs in den 1940er Jahren geprägt. Humanoide Roboter waren lange Zeit technisch nicht realisierbar. Für die Entwicklung humanoider Roboter müssen viele wichtige Probleme gelöst werden. Sie sollen autonom in ihrer Umwelt reagieren und möglichst auch interagieren können, wobei ihre Mobilität durch zwei Beine als Fortbewegungsmittel beschränkt ist. Außerdem sollen sie durch zwei künstliche Arme und Hände Arbeiten verrichten können. Seit 2000 (ASIMO von Honda[12]) scheinen die grundlegenden Probleme gelöst. Inzwischen werden regelmäßig neue Entwicklungen in diesem Bereich vorgestellt (siehe z. B. Atlas).
Die meisten Humanoiden gehören zur Gattung der Laufroboter, während einige Systeme auch mit einer mobilen Basis auf Rädern ausgestattet sind.
Industrieroboter |

Industrieroboter
1954 meldete George Devol erstmals ein Patent für Industrieroboter an. Heutige Industrieroboter sind in der Regel nicht mobil. Grundsätzlich sind sie vielseitig einsetzbar, jedoch in Verbindung mit dem eingesetzten Werkzeug sind sie speziell auf ein oder wenige Einsatzgebiete festgelegt. Dabei wird das Werkzeug am Flansch des Roboters in der Regel fest montiert und ist im einfachsten Fall ein Greifer, der den Roboter für Handlingaufgaben prädestiniert. Soll der Roboter vielseitiger eingesetzt werden, so kommen Kupplungen zum Einsatz, die einen Tausch des Werkzeuges auch während des Betriebes ermöglichen.
1961 wurden sie erstmals bei General Motors in Produktionslinien eingesetzt. In Deutschland wurden Industrieroboter, beispielsweise für Schweißarbeiten in der Automobilindustrie, seit etwa 1970 eingesetzt. Weitere Einsatzgebiete für Industrieroboter sind Handling, Palettieren, Bestücken, Fügen, Montieren, Kleben, Punkt- und Bahnschweißen und auch Messaufgaben.
Durch die Vielseitigkeit von Industrierobotern sind diese bis heute am weitesten verbreitet. Zu den Industrierobotern zählen auch die so genannten Portalroboter, die beispielsweise bei der Produktion von Wafern, in Vergussanlagen oder in der Messtechnik als Koordinatenmessgerät eingesetzt werden. Heute werden auch viele Handlingaufgaben durch Industrieroboter ausgeführt.
Medizinroboter |
Medizinroboter werden in verschiedenen Bereichen der Medizin eingesetzt. Diese sind unter anderem Chirurgie, Diagnostik und Pflege. Die bekanntesten kommerziellen Vertreter sind das Da-Vinci-Operationssystem (Intuitive Surgical, Sunnyvale, CA, USA), der Artis Zeego (Siemens Healthcare, Erlangen, Deutschland) und der Care-O-bot (Fraunhofer IPA, Stuttgart, Deutschland; nicht kommerziell erhältlich). Daneben gibt es eine große Zahl an wissenschaftlichen medizinischen Robotersystemen in der Forschung.
Serviceroboter |
Serviceroboter für Privatpersonen |
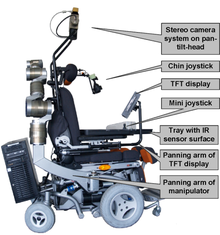
Assistenzroboter FRIEND
Serviceroboter verrichten selbständig Arbeiten im Haushalt. Bekannte Anwendungen umfassen:
Staubsaugerroboter, beispielsweise von Electrolux, Siemens oder iRobot
- Rasenmähroboter
- Fensterreinigungsroboter
Assistenzroboter bzw. AAL-Roboter (Ambient Assisted Living), beispielsweise der Assistenzroboter FRIEND, der am Institut für Automatisierungstechnik der Universität Bremen entwickelt wurde und behinderte und ältere Personen bei den Aktivitäten des täglichen Lebens unterstützen und ihnen eine Reintegration ins Berufsleben ermöglichen soll, oder Care-O-bot.
Mobilisse, Sprachgesteuerter Auskunfts- und Serviceroboter im Verkehrsumfeld die z. B. für mobilitätseingeschränkte Reisende einfache Handgriffe erledigen und schwere Lasten abnehmen (Information, Wegeleitung, Gepäcktransport, Einstiegshilfe).
Professionelle Serviceroboter |
Professionelle Serviceroboter erbringen Dienstleistungen für Menschen außerhalb des Haushalts. Eine professionelle Anwendung wurde z. B. im Umweltbereich im Forschungsvorhaben PV-Servitor[13] erforscht. Als professioneller Service wurde die automatische Reinigung und Inspektion großflächiger Photovoltaik Freilandanlagen in Europa untersucht.
- Serviceroboter zur Reinigung und Inspektion von Solarkraftwerken
Spielzeugroboter |

Der Spielzeugroboter Aibo im Turnier
Die meisten roboterähnlichen Spielzeuge sind keine Roboter, da ansonsten sämtliche selbst bewegende Gegenstände als Roboter anzusehen wären. Trotzdem gibt es Roboter, die man als Spielroboter bezeichnet, da ihr automatisierter Funktionsumfang im Wesentlichen keinen arbeits- oder forschungstechnischen Nutzen hat. Ein Beispiel hierfür ist der einem Hund ähnelnde Lauf- und Spielroboter Aibo von Sony oder der Robosapien von WowWee. Diese Spieleroboter werden in der Four-Legged League beim jährlichen Roboterfußball eingesetzt. Seine Produktion wurde trotzdem eingestellt.
Ein weiteres Beispiel ist die Lego-Mindstorms-Serie, die zu Bildungszwecken in Schulen verwendet wird.[14] Es lassen sich allerdings auch umfangreichere Maschinen mit den Mindstorms herstellen, deren Funktionalitäten denen professioneller Serviceroboter entspricht.
Erkundungsroboter |

Global Hawk auf der ILA 2002
Unter Erkundungsrobotern versteht man Roboter, die an Orten operieren, die für den Menschen (lebens-)gefährlich oder gar unzugänglich sind und ferngesteuert oder (teilweise) autark operieren. Dies gilt für Gebiete, in denen ein militärischer Konflikt ausgetragen wird. Aber auch für Gegenden, die bisher für den Menschen nur sehr schwer oder gar nicht erreichbar sind, wie die Mond- oder Marsoberfläche. Schon allein wegen der riesigen Entfernung der anderen Planeten ist eine Fernsteuerung von der Erde aus unmöglich, weil die Signale hin und zurück Stunden benötigen würden. In diesen Fällen muss dem Roboter eine Vielzahl von möglichen Verhaltensweisen einprogrammiert werden, wovon er die sinnvollste wählen und ausführen muss.
Zur Erkundung enger Pyramidenschächte, in die Menschen nicht eindringen können, wurden schon mit Sensoren bestückte Roboter eingesetzt. Es wird auch darüber nachgedacht, einen sogenannten Cryobot, der sich durch Eis schmilzt, in den Wostoksee herab zu lassen. Dieser ist von der Außenwelt durch eine über drei Kilometer dicke Eisschicht hermetisch abgeriegelt. Forscher vermuten in diesem ein unberührtes Ökosystem, was auf gar keinen Fall durch „oberirdische“ Mikroben kontaminiert werden soll.
Militärroboter |
Militärroboter sind Roboter, die zu militärischen Aufklärungs- und Kampfzwecken eingesetzt werden. Diese können sich in der Luft, zu Land oder auf und unter Wasser selbstständig also autark bewegen. Beispiele hierfür sind die luftgestützte Global Hawk oder die landgestützte SWORDS. Diese können sowohl zur reinen Selbstverteidigung als auch zum aktiven Angriff auf Ziele Waffen mit sich tragen.
Rover und Lander |
Unter einem Rover versteht man in der Raumfahrt Roboter, die sich mobil auf der Oberfläche anderer Himmelskörper fortbewegen. Beispiele hierfür sind die Zwillingsroboter Spirit und Opportunity auf dem Mars. Letztere können sich unabhängig von der Bodenkontrolle ihren Weg suchen. Auch nichtmobile Einheiten, sogenannte Lander, können als Roboter bezeichnet werden. Die Mondrover der Apollomissionen waren keine Roboter, weil sie direkt von Menschen gesteuert wurden.
Personal Robots |
Personal Robots (kurz PR, engl. für „persönlicher Roboter“) sind Roboter, die im Gegensatz zu Industrierobotern dazu bestimmt sind, mit Personen und anderen Personal Robots in Netzwerken zu kommunizieren und zu interagieren. Personal Robots können von einer einzelnen Person bedient, genutzt und gesteuert werden.
Eine Unterteilung in öffentlich genutzte Personal Roboter wie Serviceroboter und personengebundene Personal Roboter wie Spielzeugroboter ist, wie bei den Personal Computern, sinnvoll. Durch die abgeschlossene Konstruktion der PR funktionieren diese Maschinen weitgehend unabhängig, autonom, autark und selbständig. Die Personal Robots sind zunehmend lernfähig. Vielfache Schnittstellen ermöglichen eine Kommunikation in Netzwerken. So mit anderen Robotern, Computern usw. Personal Robots reagieren mit Ihren Sensoren auf äußere Einflüsse wie Berührungen, Töne, Laute, optische Veränderungen usw. Personal Robots speichern Daten und Informationen. Erworbene Erfahrungen beeinflussen sie und so realisieren die PRs mit diesen Erkenntnissen ihr weiteres Handeln.
Sonstige Erkundungsroboter |

Roboter der israelischen Polizei bei der Untersuchung eines verdächtigen Gegenstandes

Minenentschärfroboter tEODor der Bundeswehr beim Zerstören einer simulierten Sprengfalle
Ebenfalls als Roboter bezeichnet man mobile Einheiten, die zum Aufspüren, Entschärfen oder Sprengen von Bomben oder Minen eingesetzt werden, wie der sogenannte TALON-Roboter. Auch gibt es Roboter, die in Trümmern nach verschütteten Menschen suchen können, sog. Rettungsroboter (englisch rescue robots).[15][16] Mittlerweile gibt es auch den sog. Killer-Roboter (vgl. auch Kampfroboter).[17] [18]Autonomous Underwater Vehicles sind autonome Tauchroboter für Aufgaben im Meer.
Soziale Robotik |
Soziale Robotik erforscht Interaktionsmöglichkeiten zwischen Robotern und ihrer Umwelt. Anwendungsmöglichkeiten sind die Autismustherapie für Kinder[19] und die Pflege älterer Menschen.[20] Wichtige Forscher auf dem Gebiet sind Cynthia Breazeal und Frauke Zeller.
Soziale Robotik kann man als Gegenentwurf zu Industrierobotern betrachten. Es fehlt eine praktisch nutzbare Funktion,[21] sie bauen soziale Beziehungen auf und passen sich an ihre Umwelt an. In einigen Diskursen wird die Rolle von „social Robotics“ noch weiter gefasst. So werden Roboter als Lebewesen betrachtet und es wird von Unterordnung in Form eines sozialen Gefälles gesprochen.[22]
Geschichte |
William Grey Walter hat in den 1940er Jahren Schildkrötenroboter gebaut.[19] Diese sind bekannt geworden unter der Bezeichnung „Tortoises“.[23] Mark W. Tilden hat in den 1990er Jahren sogenannte BEAM Roboter erfunden:
„The BEAM robots follow a similar approach to the early Braitenberg Vehicle designs in that they use simple interlinked behaviours and mostly direct connections between sensors and actuators.“
Ab den 2000'er kam es zu einem regelrechten Boom:
Kismet (Roboter)[25]
- Leonardo (Roboter)
- Paro (Roboter)
- Aibo
Hitchbot[26]
Technische Realisierung |
Die Hardware besteht aus einem flauschigen Fell, Kulleraugen und Sound-Ausgabe, meist in Anlehnung an einen Teddybär, dazu kommen noch Aktoren, um die Beine und Arme zu bewegen. Die Steuerung erfolgt üblicherweise manuell wie bei den Modellen, die in der Autismustherapie eingesetzt werden.[27] Es gibt aber erste Ansätze Künstliche Intelligenz zu nutzen, genauer gesagt die BDI Architektur, um autonome soziale Roboter zu realisieren.[25]
Sonstige Roboterarten |
Insbesondere mobile Robotersysteme werden zunehmend an Schulen und Hochschulen zu Ausbildungszwecken eingesetzt.[28] Diese Roboter zeichnen sich durch gute Handhabbarkeit, einfache Programmierung und Erweiterbarkeit aus. Beispiele für sogenannte Ausbildungsroboter sind Robotino oder Lego Mindstorms.
Im nun entstehenden Theaterstück Frankenstein der Salzburger Künstlergruppe gold extra werken Roboter in einem Krankenhaus und „bauen nach alten Plänen einen Menschen nach“.[29]
Übernahme des Begriffs in der Informatik |
In der Informatik werden Computerprogramme, die weitgehend automatisch sich ständig wiederholende Aufgaben abarbeiten, als Bot (Kurzform von Roboter) bezeichnet.
Rezeption |
Ausstellungen |
Hello Robot, Vitra Design Museum, Weil am Rhein, bis 14. Mai 2017.[30]
Filmische Dokumentationen |
youtube.com:
- 2013: VW Golf 7 Produktion Wolfsburg (Industrieroboter)
- 2014: BMW i3 Factory Production Tour (Industrieroboter)
- 2016: humanoider Roboter Asimo, Show
- humanoider Roboter Atlas
- 2017: auf zwei Rädern rollender Roboter Handle, kostengünstig
Siehe auch |
- Robot Wars
- Automatisierung
- Automatisierungstechnik
- Robotik
- Generation R
- Robotic Natives
- Robotergesetze
Literatur |
Gero von Randow: Roboter. Unsere nächsten Verwandten. Rowohlt, Reinbek 1997, ISBN 3-498-05744-8.
- G. Lawitzky, M. Buss u. a. (Hrsg.): Service Roboter. Schwerpunktthemenheft der Zeitschrift it – Information Technology. Oldenbourg Verlag, München 49(2007)4
- Wolfgang Weber: Industrieroboter. Methoden der Steuerung und Regelung. Mit 33 Übungsaufgaben. Fachbuchverlag Leipzig, 2002, ISBN 3-446-21604-9.
- Bodo-Michael Baumunk: Die Roboter kommen. Mensch, Maschine, Kommunikation. Wachter Verlag, Heidelberg 2007, ISBN 978-3-89904-268-9 (Begleitband zur gleichnamigen Ausstellung in den Museen für Kommunikation).
- Anne Foerst: Von Robotern, Mensch und Gott. Künstliche Intelligenz und die existentielle Dimension des Lebens. Vandenhoeck & Ruprecht, Göttingen 2008, ISBN 978-3-525-56965-8 (Aus dem Englischen von Regine Kather).
- Daniel Ichbiah: Roboter: Geschichte – Technik – Entwicklung. Knesebeck, München 2005, ISBN 3-89660-276-4 (Aus dem Französischen von Monika Cyrol).
- Cosima Wagner: Robotopia Nipponica. Recherchen zur Akzeptanz von Robotern in Japan. Tectum Verlag, Marburg 2013, ISBN 978-3-8288-3171-1.
- Enrico Grassani: Automi. Passato, presente e futuro di una nuova specie, Editoriale Delfino, Milano 2017, ISBN 978-88-97323-66-2.
Ausstellung |
- 2011: Roboterträume, Museum Tinguely, Basel und Kunsthaus Graz
Weblinks |
- Deutsches Robotik und Elektronik Wiki
- Robotics Portal
- Welt-Roboterstatistik der International Federation of Robotics (IFR)
- International Federation of Robotics (IFR)
- VDMA Robotik + Automation (Wirtschaftsverband)
Einzelnachweise |
↑ robot (n.): Online Etymology Dictionary. Abgerufen am 21. Februar 2018 (englisch).
↑ Roboter. In: Duden.de. Abgerufen am 21. Februar 2018.
↑ Tomáš Sedláček: Die Ökonomie von Gut und Böse. Hanser Verlag, München 2012, ISBN 978-3-446-42823-2, S. 36.
↑ Michael Naval: Roboter-Praxis. Vogel, Würzburg 1989, ISBN 3-8023-0210-9.
↑ http://definitions.uslegal.com/r/robotics/ abgerufen am 16. April 2012.
↑ golem.de: Bill Gates: Ein Roboter in jedem Haushalt bis 2013.
↑ heise.de: Roboterbranche boomt: Deutsche Firmen rechnen mit starkem Wachstum
↑ ifr.org: 2014: By far the highest volume ever recorded Archivlink (Memento vom 27. März 2016 im Internet Archive), Zugriff am 9. Februar 2015.
↑ Autofahrer ab 2018 überflüssig. In: Spiegel Online. 7. Januar 2008.
↑ golem.de: CES: General Motors plant Autos ohne menschliche Fahrer
↑ heise.de: Chaotisches Roboter-Lager beschleunigt Auslieferung
↑ heise.de: Hondas humanoider Roboter läuft schneller und sicherer
↑ PV-Servitor: Autonomer Reinigungsroboter für Solarkraftwerke in Europa
↑ Roberta – Lernen mit Robotern Eine Initiative von Fraunhofer IAIS
↑ Roboterassistenz für die Erkundung in Rettungsmissionen th-nuernberg.de; Rescue robot wp.en
↑ Robin R. Murphy: Disaster Robotics. MIT Press, Cambridge 2014, ISBN 978-0-262-02735-9.
↑ golem.de: Samsung entwickelt Killer-Roboter für die Objektsicherung
↑ heise.de: Robocop soll die innerkoreanische Grenze schützen
↑ ab
Aleksandra Savicic: Gesprächsakzeptanz von Robotern. Magisterarbeit. Universität Wien, Wien 2010 (univie.ac.at [PDF]).
↑
Thomas Hirmann: Die Möglichkeiten und Auswirkungen von Sozial-emotionalen Robotern, insbesondere der Robbe Paro, im Einsatz in der Pflege. In: Fachbereichsarbeit. 2015 (researchgate.net [PDF]).
↑
C. P. Scholtz: Und täglich grüßt der Roboter. In: Analysen und Reflexionen des Alltags mit dem Roboterhund Aibo, Volkskunde in Rheinland-Pfalz. Informationen der Gesellschaft für Volkskunde in Rheinland-Pfalz. Band 23, 2008, S. 139--154 (c-p-scholtz.de [PDF]).
↑
Maren Krähling: In Between Companion and Cyborg: The Double Diffracted Being Else-where of a Robodog. In: Ethics in Robotics. Band 6, 2006, S. 69 (fh-potsdam.de [PDF]).
↑
Reuben Hoggett: W. Grey Walter and his Tortoises. In: http://cyberneticzoo.com/. 2011 (cyberneticzoo.com).
↑
Micah Marlon Rosenkind: Creating Believable, Emergent Behaviour in Virtual Agents, Using a ‘Synthetic Psychology’Approach. University of Brighton, 2015 (brighton.ac.uk [PDF]).
↑ ab
Marius Klug: Mensch-Roboter-Interaktion. Bachelorarbeit. 2012 (researchgate.net [PDF]).
↑
David Harris Smith, Frauke Zeller: Post-hitchBOT-ism – Interviewed by Andrea Zeffiro. In: Wi: Journal of Mobile Media. Band 10, Nr. 1, 2016 (mobilities.ca [PDF]).
↑
Cosima Wagner: Tele-Altenpflege und Robotertherapie: Leben mit Robotern als Vision und Realität für die alternde Gesellschaft Japans. In: Japanstudien. Band 21, 2009, S. 271–298 (contemporary-japan.org [PDF]).
↑ VolksBot-Lab. (Memento vom 18. September 2012 im Webarchiv archive.is) Ausbildungsrobotik-System von Fraunhofer IAIS
↑ http://salzburg.orf.at/news/stories/2622066/ Roboter als Schauspieler, salzburg.ORF.at vom 24. Dezember 2013.
↑ badische-zeitung.de, Kunst, 16. Februar 2017, Michael Baas: Vitra Design Museum beleuchtet das Verhältnis von Mensch und Maschine (17. Februar 2017)


